Ez Template
Ez Template - Allows you to use any job as a template for another job. It features pid, odometry, pure pursuit, boomerang, joystick control, and. Other users reply with links to documentation, tips, and. Computes pid based on error. 3.2.2 tutorials 🗃️ getting started. Usually i would type something like “pros::motor motorname(1);” or " Standard is where the left stick does fwd/rev and flipped is where the right stick does fwd/rev. This function ignores target entirely. Only build on linux or boxes with ipv6. Ez template is designed to help you with hard things like pid controllers and auton selectors but if you wan to add more simple functionality you will have to make it your self. This function ignores target entirely. With single stick arcade, turning. It features pid, odometry, pure pursuit, boomerang, joystick control, and. Usually i would type something like “pros::motor motorname(1);” or " Everything past kp has a default starting value, so you can just put kp. Allows you to use any job as a template for another job. It features pid, odometry, pure pursuit, boomerang, autons, joystick control, and more. Pages, they're blank, you make. Other users reply with links to documentation, tips, and. Creates a pid object with constants. Find out how to calibrate imu, select autonomous routines, test with a switch, and add new routines. It features pid, odometry, pure pursuit, boomerang, autons, joystick control, and more. This function ignores target entirely. It features pid, odometry, pure pursuit, boomerang, joystick control, and. Creates a pid object with constants. Pages, they're blank, you make. Ez template is designed to help you with hard things like pid controllers and auton selectors but if you wan to add more simple functionality you will have to make it your self. Computes pid based on error. Everything past kp has a default starting value, so you can just put kp. With single stick. Other users reply with links to documentation, tips, and. It features pid, odometry, pure pursuit, boomerang, joystick control, and. Ez template is designed to help you with hard things like pid controllers and auton selectors but if you wan to add more simple functionality you will have to make it your self. Creates a pid object with constants. 3.2.2 tutorials. Other users reply with links to documentation, tips, and. Only build on linux or boxes with ipv6. Everything past kp has a default starting value, so you can just put kp. All of this information is needed so ez. Creates a pid object with constants. Computes pid based on error. Only build on linux or boxes with ipv6. It features pid, odometry, pure pursuit, boomerang, joystick control, and. Allows you to use any job as a template for another job. Find out how to calibrate imu, select autonomous routines, test with a switch, and add new routines. All of this information is needed so ez. Usually i would type something like “pros::motor motorname(1);” or " This function ignores target entirely. With single stick arcade, turning. Standard is where the left stick does fwd/rev and flipped is where the right stick does fwd/rev. This function ignores target entirely. Ez template is designed to help you with hard things like pid controllers and auton selectors but if you wan to add more simple functionality you will have to make it your self. Usually i would type something like “pros::motor motorname(1);” or " Everything past kp has a default starting value, so you can just. Computes pid based on error. Creates a pid object with constants. I’ve been trying to figure out of the initialize motors and pistons in the ez template. This function ignores target entirely. Usually i would type something like “pros::motor motorname(1);” or " Pages, they're blank, you make. 3.2.2 tutorials 🗃️ getting started. Standard is where the left stick does fwd/rev and flipped is where the right stick does fwd/rev. Everything past kp has a default starting value, so you can just put kp. Find out how to calibrate imu, select autonomous routines, test with a switch, and add new routines. Only build on linux or boxes with ipv6. Everything past kp has a default starting value, so you can just put kp. Other users reply with links to documentation, tips, and. Find out how to calibrate imu, select autonomous routines, test with a switch, and add new routines. Creates a pid object with constants. This function ignores target entirely. With single stick arcade, turning. Standard is where the left stick does fwd/rev and flipped is where the right stick does fwd/rev. Pages, they're blank, you make. Other users reply with links to documentation, tips, and. Allows you to use any job as a template for another job. Usually i would type something like “pros::motor motorname(1);” or " Computes pid based on error. Everything past kp has a default starting value, so you can just put kp. It features pid, odometry, pure pursuit, boomerang, joystick control, and. Creates a pid object with constants. I’ve been trying to figure out of the initialize motors and pistons in the ez template. Find out how to calibrate imu, select autonomous routines, test with a switch, and add new routines. Ez template is designed to help you with hard things like pid controllers and auton selectors but if you wan to add more simple functionality you will have to make it your self.![]()
Ez Template
![]()
Letter ez logo design template, ez letter logo design 12110142 Vector
Help with EZ Template Programming Support VEX Forum
![]()
Ez Template Stock Illustrations 1,005 Ez Template Stock Illustrations
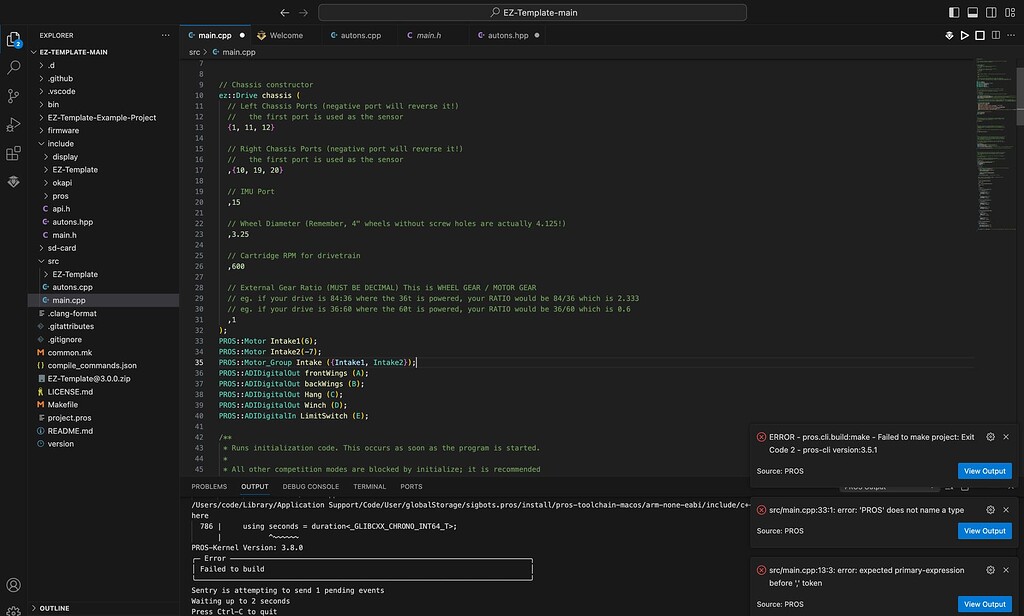
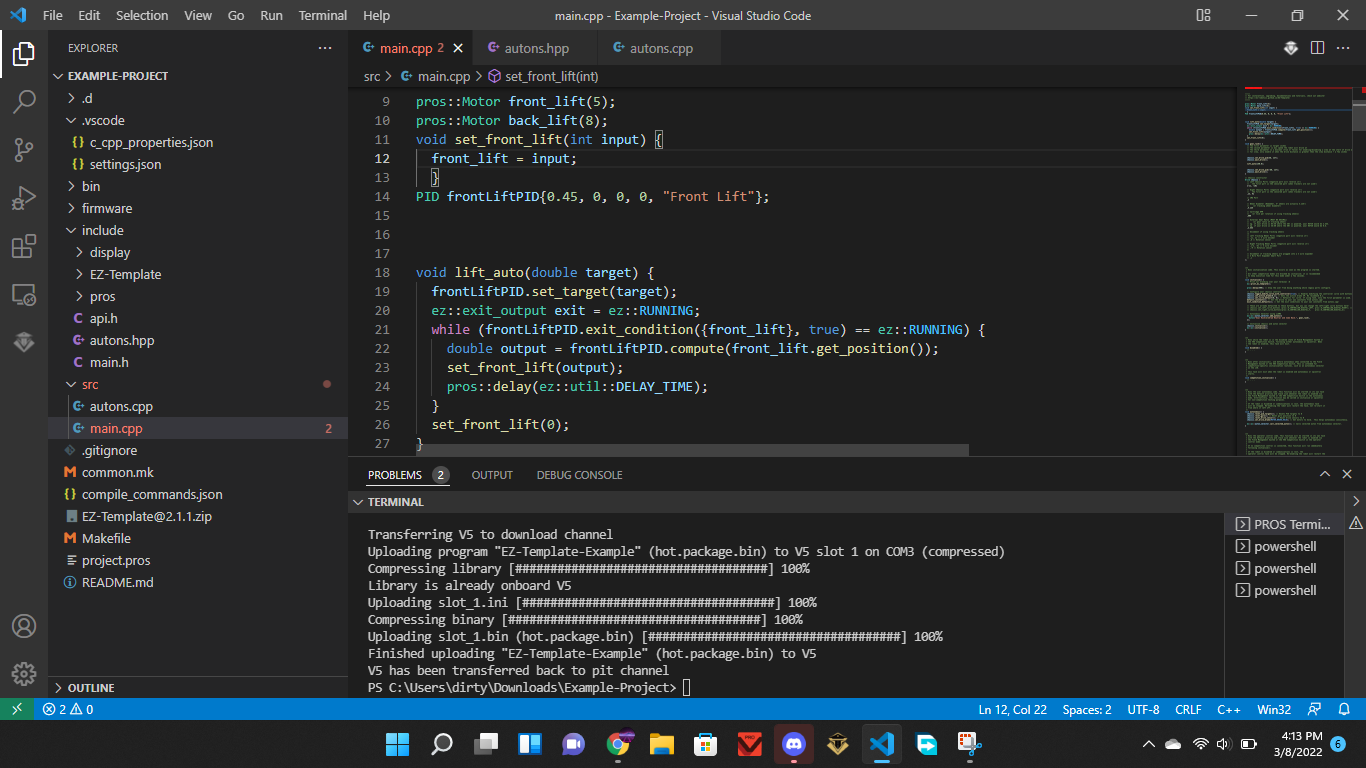
I need help with debugging PROS EZ template code Programming Support
![]()
Ez Template
![]()
Ez Template

How to setup PROS and EZ Template in Visual Studio Code YouTube
three.ez Template StackBlitz
GitHub basil/eztemplatesplugin A easy and seamless way to create
It Features Pid, Odometry, Pure Pursuit, Boomerang, Autons, Joystick Control, And More.
Only Build On Linux Or Boxes With Ipv6.
All Of This Information Is Needed So Ez.
3.2.2 Tutorials 🗃️ Getting Started.
Related Post: